近日,上海交通大学hga010网页登录重大装备设计与控制工程研究所郭为忠教授团队在Mechanism and Machine Theory上发表了题为“Updating structural synthesis methodology of mechanisms: from kinematic geometry to kinematic geometry accompanied with statics”的研究论文。该团队突破了目前国际上机构拓扑综合理论方法仅考虑运动几何约束的局限,首次在机构构型设计中引入力流传递特征,系统建立了同时考虑几何约束和传力特征的机构拓扑综合新方法,更适合考虑机-环境存在力交互作用的现代机械装备创新设计的需要。重大装备设计与控制工程研究所博士研究生韩有承为论文第一作者,郭为忠教授为通讯作者。
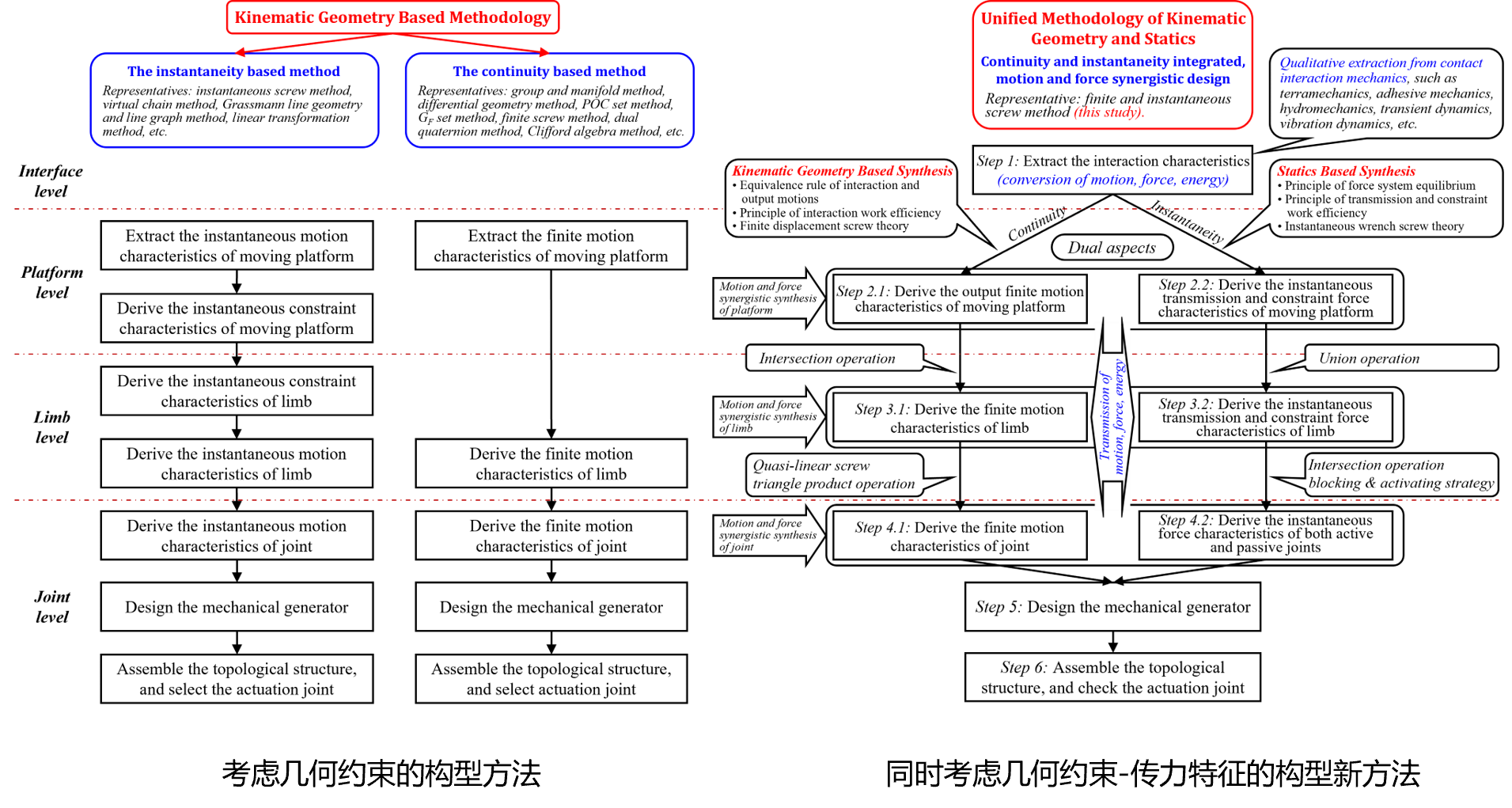
论文以着陆外星的可移动式新型着陆器重大需求为背景,聚焦现代装备创新研发过程的机构构型综合阶段,需要同时考虑运动特性要求和传力性能要求,而目前的机构构型理论仅考虑运动特性要求,未考虑传力性能要求的问题。论文回顾了1983年以来机器人机构学领域发展的运动几何学体系下的11种拓扑综合方法,针对仅考虑机构运动特征而忽视传力特征、做功能效以及机-环境力交互特性等不足,创新性提出兼顾运动几何学与力学的运动特征与传力特性双轨并重、协同综合的整机构型设计思想,揭示了拓扑综合层面力流及其对运动做功效率在平台、支链和关节层面作用与传递规律,建立了考虑几何约束和传力特征的拓扑综合新方法,开创了面向机-环境力交互的共融机器人构型设计新范式。
论文将机构视为几何约束、力流通道和能量网络的有机统一体,适用于满足期望运动外,还需具备大承载、强刚度、高功效需求等力学交互场景的拓扑综合,兼具代数符号化解析和几何直观化表征等特点。为了建立该方法,论文首先发展了有限与瞬时旋量理论,给出内嵌有限运动算子的瞬时力旋量修正表示及基于此的虚功原理。然后,引入旋量互易关系和互易积非零关系,揭示出力交互/传递/约束功效优化原理,以及交互/传递/约束力旋量系平衡原理;构建了基于交互运动、力和做功效率推演确定输出有限运动特征、传递力特征和约束力特征的公理化方法;构建了基于输出端特征(运动、力、能效)确定支链特征及其Motion Generator和装配几何条件的公理化方法。
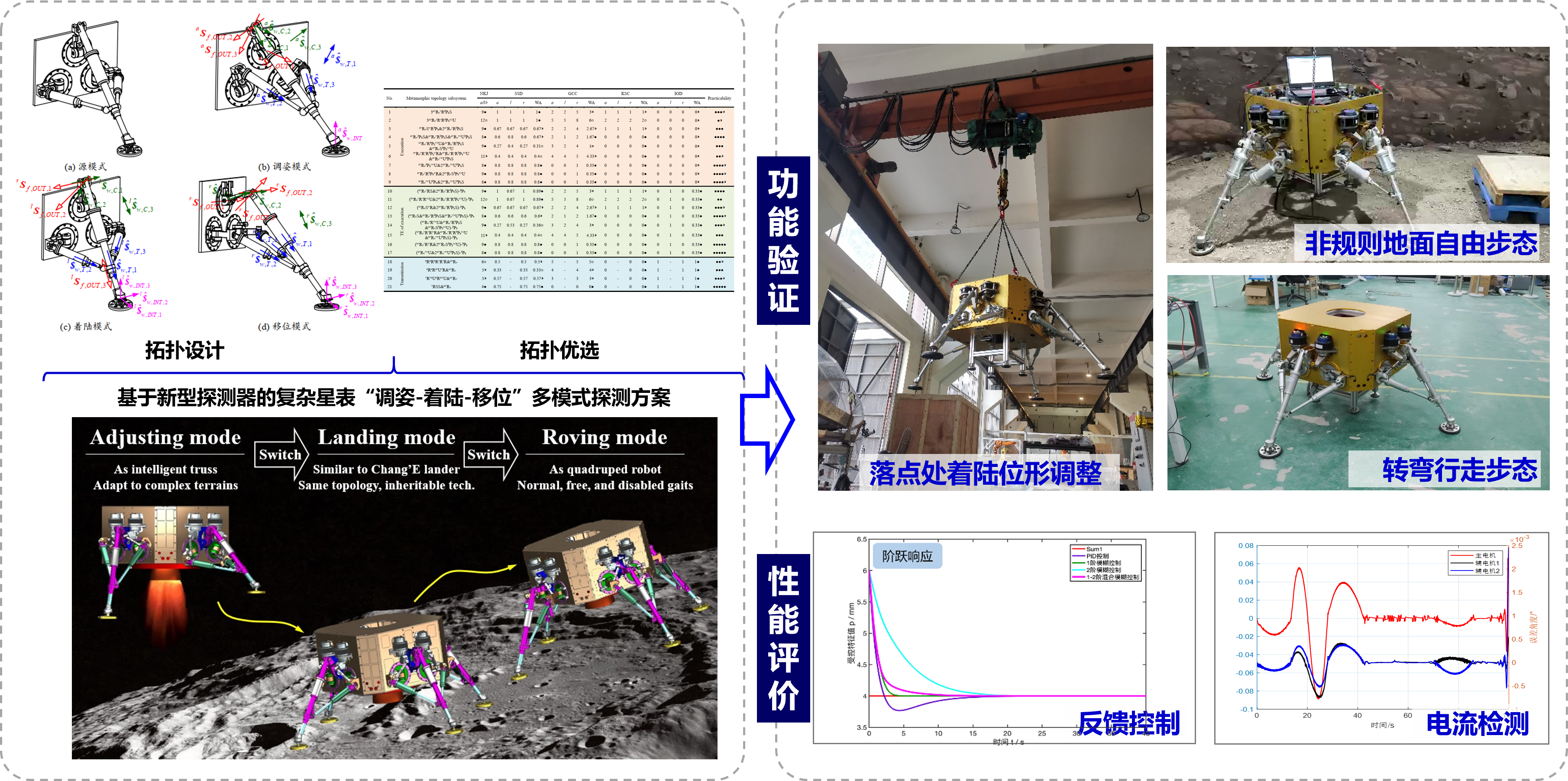
运用所建立的方法,论文提出了面向工程需求的调姿-着陆-移位多模式可重构新型探测器拓扑系统设计架构,优选出实验样机构型,研制了实验样机并开展了实验验证研究,实现了在构型设计阶段即能保障有效提升着陆瞬时冲击负荷能力和重载移位行走能力。
Mechanism and Machine Theory创刊于1970年,是IFToMM(国际机构与机器科学联合会)会刊,专注于发布机构与机器科学领域的高质量研究论文,在国际机构与机器科学领域享有盛誉。
郭为忠教授团队致力于解决现代机构学与并联机器人领域的前沿基础性科学问题及关键技术,旨在通过基础理论突破推动航空航天等相关工程应用领域的重大装备创新发展。近年来在Mechanism and Machine Theory,ASME Journal of Mechanisms and Robotics,ASME Journal of Mechanical Design,IEEE Transactions on Robotics等国际期刊上发表系列学术论文。
论文链接:https://www.sciencedirect.com/science/article/pii/S0094114X23002872
